大纲

我们是谁
一个由拥有共同兴趣的利益相关方所组成的神经符号人工智能自由交流空间。
创新、协调、绿色、开放、共享的新型产学研用协同创新范式。
技术创新、应用示范、产业孵化无缝对接的成果转化新体制和新机制。
社区价值:直接参与交流与对话,收获知识与机会;为社区成员答疑解惑,收获情感认同;用户反馈帮助技术迭代,提升产品价值……
我们的目标和
我们的任务
我们的任务
人工智能赋能绿色制造产业,以制造模式的深度变革推动传统产业绿色转型升级,推动制造业高端化、智能化、绿色化发展,形成绿色低碳的生产方式和生活方式, 为实现碳达峰碳中和目标提供有力支撑。
建立“知行合一、训推一体” 的机器人具身智能控制架构和安全可控的拆解智能化技术支撑体系;
基于神经符号AI的自主拆解机器人,建立知识驱动的柔性混流拆解系统,实现复杂动态拆解场景下的多品种、小批量退役产品的智能拆解。
我们的大事记
回望过去、洞察发展历程;融入社区、抒写我们共同的未来!

我们的行动
- 基于神经符号AI的机器人拆解智能化技术路线图(2023版) (PDF下载)
- 基于神经符号AI的机器人拆解智能化技术路线图2.0 (2024版) (PDF下载)
- 基于神经符号AI的机器人拆解智能化技术路线图3.0 (2025版) (PDF下载)
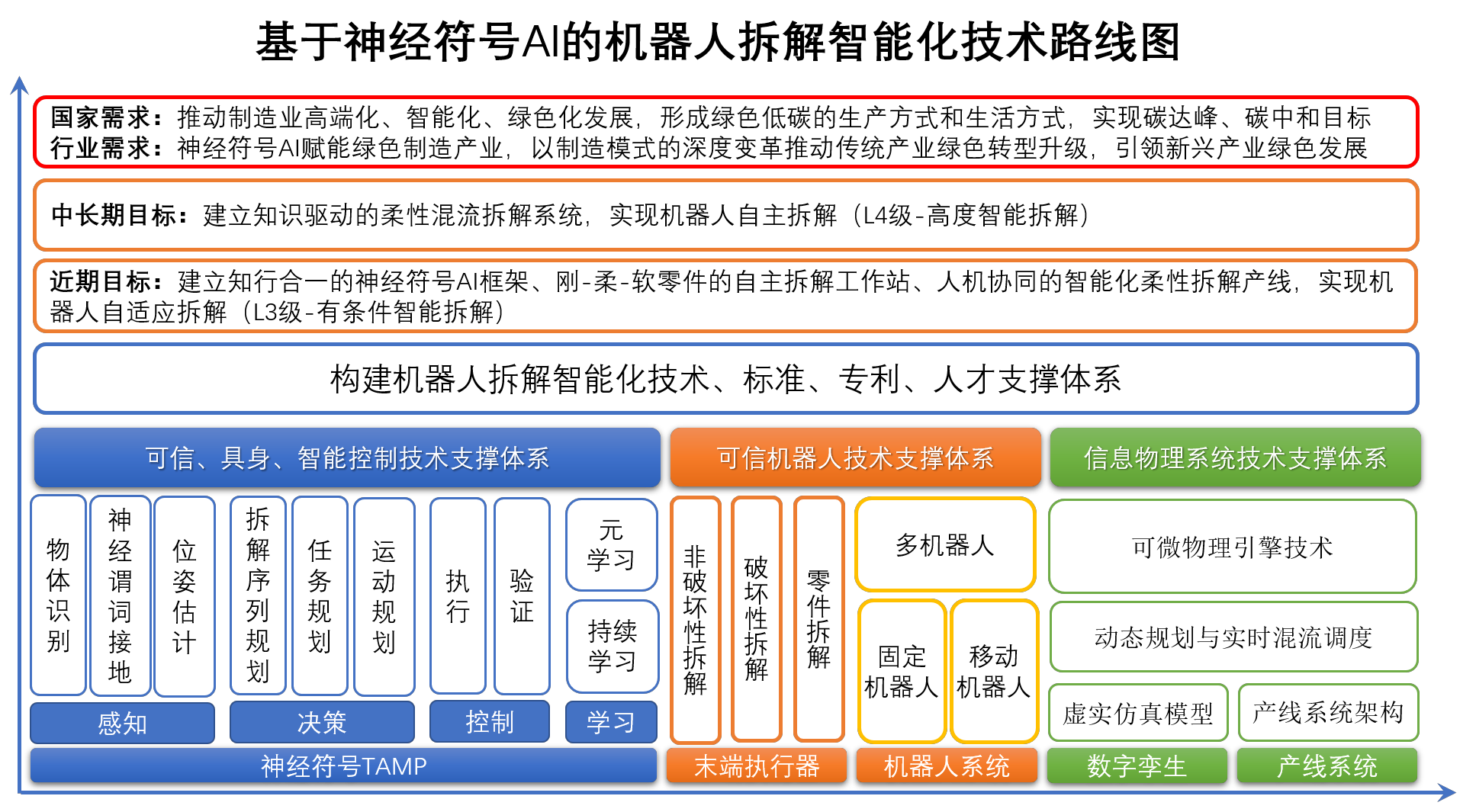
基于神经符号AI的机器人拆解智能化技术路线图
发展目标
以制造业高端化、智能化、绿色化发展为导向,攻克和掌握符合市场需求、实现机器人自主拆解的可信人工智能技术,构建自主可控技术体系和标准、专利、人才支撑体系,探索建立软硬件协同创新生态,推动我国机器人拆解智能化共性基础技术和重大前沿技术的自主发展。
绿色制造的人工智能标准化工作
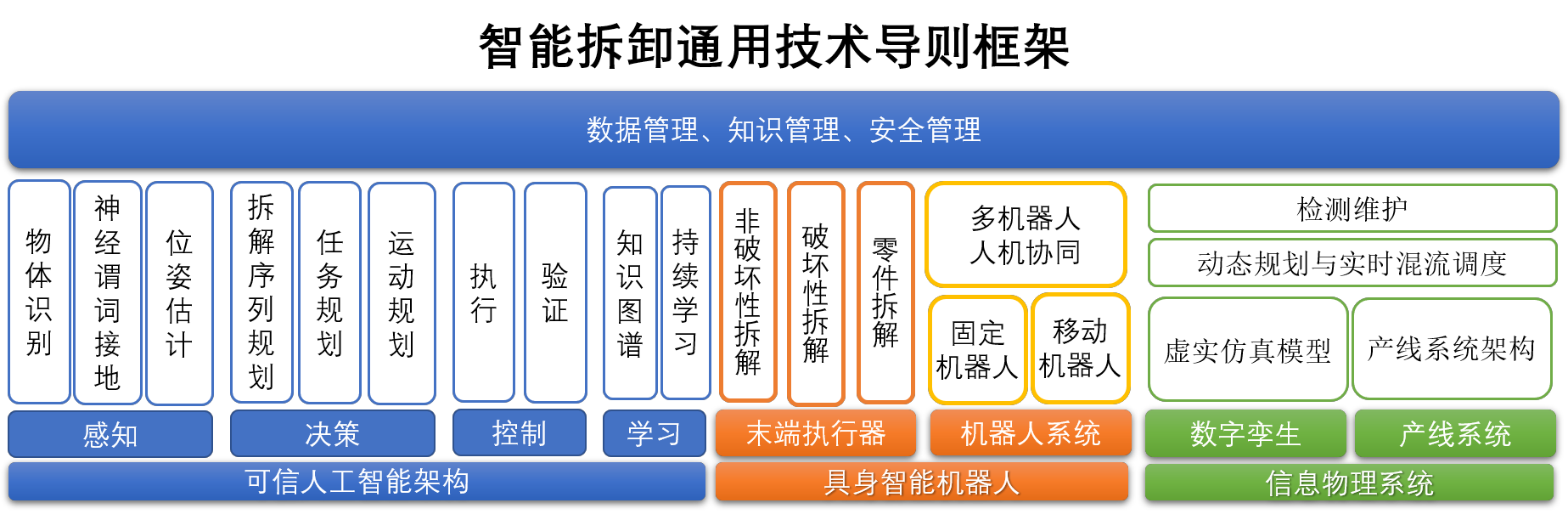
智能拆卸通用技术导则
规范拆卸智能化中的多模态信息感知、自主决策控制、人机协同系统、动态规划、实时调度、检测维护、数据知识管理、安全管理等方面的技术要求。通过人工智能赋能绿色制造,以制造模式的深度变革推动传统产业的绿色转型升级,引导我国产品回收拆解行业的高端化、智能化、绿色化发展。
- 第一届神经符号AI社区暑期学校(2023年6月19日,在线举办) (PDF下载)
- 2024年上海交通大学神经符号人工智能暑期学校——课程安排 (PDF下载)
- 神经符号人工智能暑期学校:入学前必备知识清单 (PDF下载)
- 2024年神经符号人工智能暑期学校圆满落幕! (PDF下载)
- 《2025年神经符号AI社区暑期学校课程大纲》正式发布! (PDF下载)
暑期学校
以前所未有的方式一起来体验学习
面向在校学生,对神经符号人工智能富有热情、有志于进一步在智能机器人领域深造的青年人。
加深对神经符号人工智能、认知机器人、机器学习原理和技术的理解,提高从事科研工作的综合能力,培养批判性思维。
- 基于神经符号AI的动力电池自主拆解机器人(PDF下载)
- 面向动力电池自主拆卸的螺钉精确检测方法 (PDF下载)
- 基于力感知的螺钉稳健套接方法 (PDF下载)
- 基于符号算子的自主决策与规划方法 (PDF下载)
- 基于大型语言模型的机器人任务智能规划方法 (PDF下载)
- 动力电池多功能螺钉自主拆解工作站 (PDF下载)
- 机器人智能拆解工作站的数字孪生 (PDF下载)
- 动力电池自主拆卸机器人的数字孪生系统研究 (PDF下载)
社区共享项目
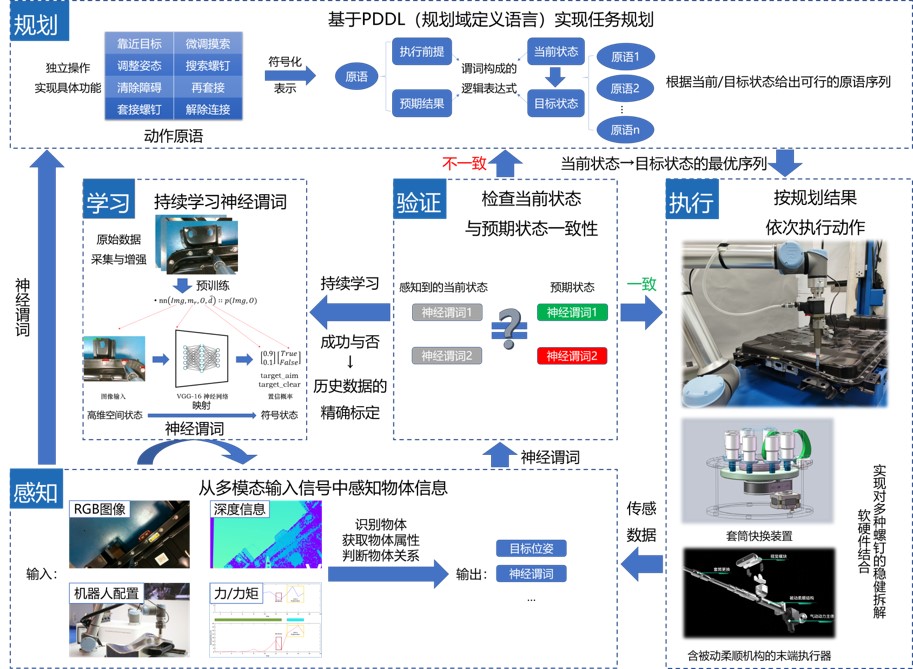
针对非结构化拆解环境下机器人自主拆解决策与运动规划问题,围绕拆解过程中拆解对象的复杂性、拆解目标的多样性和拆解深度的不确定性,基于神经符号的机器人拆解决策与运动规划方法,通过对退役动力电池的零部件结构、几何约束、连接方式、连接状态的感知、推理、学习,形成决策、规划、控制、监督命令流,实现动态非结构化环境中的自主、可解释、稳健拆解。
针对拆解动作的稳健控制问题,围绕拆解过程中的动态感知和实时运动规划场景,通过建立基于视觉的位姿感知方法和基于力感知的拆解行为柔顺控制模型,结合感知运动控制反馈和先验知识的约束,优化全局性实时感知控制策略,实现拆解动作的稳健控制。
我们的出版物
- 基于神经符号的动力电池拆解任务与运动规划[J]. 计算机研究与发展, 2021, 58(12): 2604-2617. (PDF下载)
- A Method of Domain Dictionary Construction for Electric Vehicles Disassembly[J]. Entropy 2022, 24(3), 363. (PDF下载)
- A novel knowledge-driven flexible human-robot hybrid disassembly line and its key technologies for electric vehicle batteries[J]. Journal of Manufacturing Systems 68 (2023) 338-353. (PDF下载)
- An accurate activate screw detection method for automatic electric vehicle battery disassembly[J]. Batteries, 2023, 9(3),187. (PDF下载)
- 关于退役动力电池机器人拆解智能化的思考[J].汽车与配件2023,5:54-58. (PDF下载)
- Towards Agile Robots: Intuitive Robot Position Speculation with Neural Networks[J]. arXiv preprint arXiv:2402.16281, 2024. (PDF下载)
- Experience-Driven NeuroSymbolic System for Efficient Robotic Bolt Disassembly[J]. Batteries, 2025, 11(9): 332. (PDF下载)
期刊论文
- Decoding RobKiNet: Insights into Efficient Training of Robotic Kinematics Informed Neural Network[C]//2025 IEEE 21st International Conference on Automation Science and Engineering (CASE). IEEE, 2025: 1547-1554. (PDF下载)
- Embodied Intelligence in Disassembly: Multimodal Perception Cross-valiation and Continual Learning in Neuro-Symbolic TAMP[C]//2025 IEEE 21st International Conference on Automation Science and Engineering (CASE). IEEE, 2025: 1561-1568. (PDF下载)
- Revolutionizing Battery Disassembly: The Design and Implementation of a Battery Disassembly Autonomous Mobile Manipulator Robot(BEAM-1).2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024: 6367-6374. (PDF下载)
- Robotic Autonomous Disassembly System for Automotive Power Battery Remanufacturing[C]//International Workshop on Autonomous Remanufacturing. Cham: Springer Nature Switzerland, 2024: 71-83. (PDF下载)
- Autonomous Electric Vehicle Battery Disassembly Based on NeuroSymbolic Computing[C]//Proceedings of SAI Intelligent Systems Conference. Springer, Cham, 2023: 443-457. (PDF下载)
- Development of an Autonomous, Explainable, Robust Robotic System for Electric Vehicle Battery Disassembly[C]//2023 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). IEEE, 2023: 409-414. (PDF下载)
- Design and Implementation of a Multifunctional Screw Disassembly Workstation[C]//International Conference on Intelligent Robotics and Applications. Singapore: Springer Nature Singapore, 2023: 506-519. (PDF下载)
- Boosting Robot Intelligence in Practice: Enhancing Robot Task Planning with Large Language Models[C]//2023 8th International Conference on Robotics and Automation Engineering (ICRAE). Singapore: Singapore, 2023: 90-94. (PDF下载)
- A SWOT and AHP Methodology for the formulation of development strategies for Chinas waste EV battery recycling industry[C]//Cascade Use in Technologies 2018: Internationale Konferenz zur Kaskadennutzung und Kreislaufwirtschaft–Oldenburg 2018. Berlin, Heidelberg: Springer Berlin Heidelberg, 2018: 83-92. (PDF下载)
会议论文
- 基于神经符号AI的机器人拆解智能化技术路线图3.0 (2025版) (PDF下载)
- 基于神经符号AI的机器人拆解智能化技术路线图2.0 (2024版) (PDF下载)
- 基于神经符号AI的机器人拆解智能化技术路线图(2023版) (PDF下载)
- 神经符号具身智能——赋能绿色制造的创新实践(第三届人本智造学术会议,北京) (PDF下载)
- 绿色、低碳、循环、智能——汽车产业新质生产力发展之道(蔚来汽车《循环汽车蓝皮书》序) (PDF下载)
- 2024年神经符号人工智能暑期学校总结报告 (PDF下载)
- CNCC 2024技术论坛特邀报告:NeuroSymbolic TAMP——推动工业机器人具身化的创新实践 (PDF下载)
- 神经符号人工智能讲座1-神经符号人工智能及其关键技术 (PDF下载)
- 神经符号人工智能讲座2-机器人位置猜测网络的原理与实现 (PDF下载)
- 神经符号人工智能讲座3-具有自主可解释性和鲁棒性的动力电池拆解系统 (PDF下载)
- 神经符号人工智能讲座4-基于神经符号AI的多种类紧固件自主拆解 (PDF下载)
- 神经符号人工智能讲座5-大型语言模型增强机器人任务规划 (PDF下载)
- 神经符号人工智能讲座6-复杂环境中的机器人规划与实践 (PDF下载)
- 神经符号人工智能讲座7-基于知识驱动的动力电池人机混流拆解生产线 (PDF下载)
- 神经符号人工智能讲座8-基于神经符号AI的车用聚合物静电分离产物识别方法研究 (PDF下载)
- 神经符号人工智能讲座9-神经符号人工智能_2020年以来的基础研究进展与科学问题 (PDF下载)
- 神经符号人工智能讲座10-机器人控制技术的演进与发展 (PDF下载)
专题报告
我们的研究成果与视频
- 基于神经符号AI的动力电池自主拆解机器人(2022 视频)
- 动力电池多功能螺钉自主拆解工作站(2023 视频)
- 机器人智能拆解工作站数字孪生系统(2024 视频)
- 神经符号AI赋能机器人直觉——机器人位置猜测网络RPSN(2024 视频)
- 动力电池自主拆卸机器人的数字孪生系统(2025 视频)
我们的数据集与模型
- 《动力电池数据集 数据采集与规范》 (PDF下载)
- 动力电池图像数据集(第一部分)包括1719幅动力电池的RGB图像,并使用LabelImg软件手动标记所有图像中的螺钉。该数据集包括总共6992个外六角螺钉和687个六角螺母。
- 动力电池图像数据集(第二部分)包括1159幅动力电池的RGB图像,包含动力电池拆解各个阶段的图像信息,用于动力电池各个模块的识别及测试。
- 动力电池图像数据集(第三部分)包括1200幅动力电池的RGB图像,使用LabelImg软件手动标记所有图像中的螺钉,并根据当前拆解状态(末端执行器是否对准、是否存在障碍等四种状态)进行分类,用于训练神经谓词模型。
- 动力电池图像数据集(第四部分)包括300幅动力电池常见螺钉的RGB图像,并使用LabelImg软件手动标记所有图像中的螺钉。该数据集包括不同规格的外六角螺钉、内六角螺钉、十字螺钉和星型螺钉等八种螺钉。
