大纲
- 基于神经符号AI的动力电池自主拆解机器人(PDF下载)
- 面向动力电池自主拆卸的螺钉精确检测方法 (PDF下载)
- 基于力感知的螺钉稳健套接方法 (PDF下载)
- 基于符号算子的自主决策与规划方法 (PDF下载)
- 基于大型语言模型的机器人任务智能规划方法 (PDF下载)
- 动力电池多功能螺钉自主拆解工作站 (PDF下载)
- 基于直觉的动力电池人形拆解机器人
- 机器人智能拆解工作站的数字孪生 (PDF下载)
- 动力电池自主拆卸机器人的数字孪生系统研究 (PDF下载)
社区共享项目
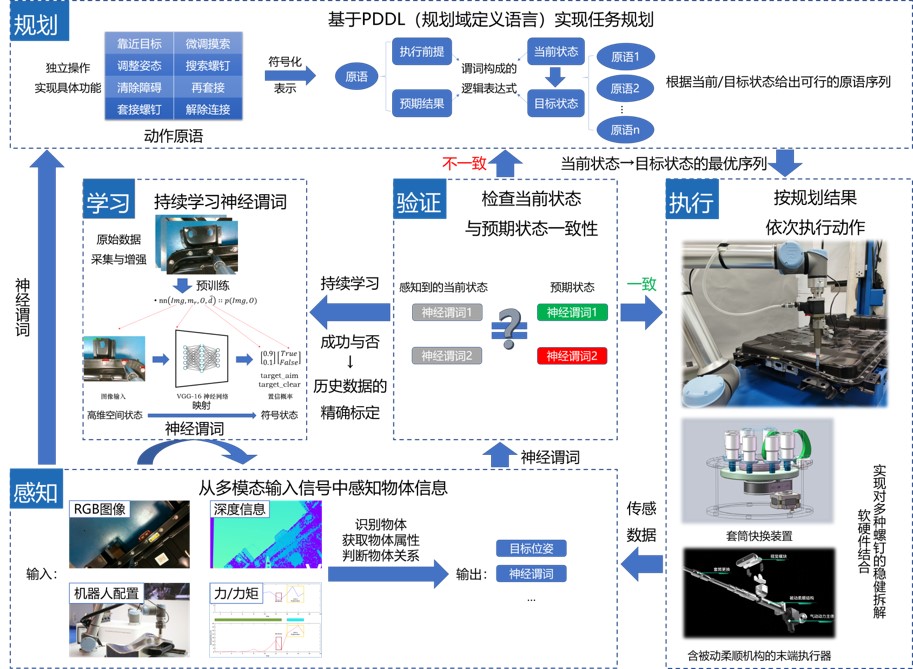
针对非结构化拆解环境下机器人自主拆解决策与运动规划问题,围绕拆解过程中拆解对象的复杂性、拆解目标的多样性和拆解深度的不确定性,基于神经符号的机器人拆解决策与运动规划方法,通过对退役动力电池的零部件结构、几何约束、连接方式、连接状态的感知、推理、学习,形成决策、规划、控制、监督命令流,实现动态非结构化环境中的自主、可解释、稳健拆解。
针对拆解动作的稳健控制问题,围绕拆解过程中的动态感知和实时运动规划场景,通过建立基于视觉的位姿感知方法和基于力感知的拆解行为柔顺控制模型,结合感知运动控制反馈和先验知识的约束,优化全局性实时感知控制策略,实现拆解动作的稳健控制。

加入我们
