我们的行动
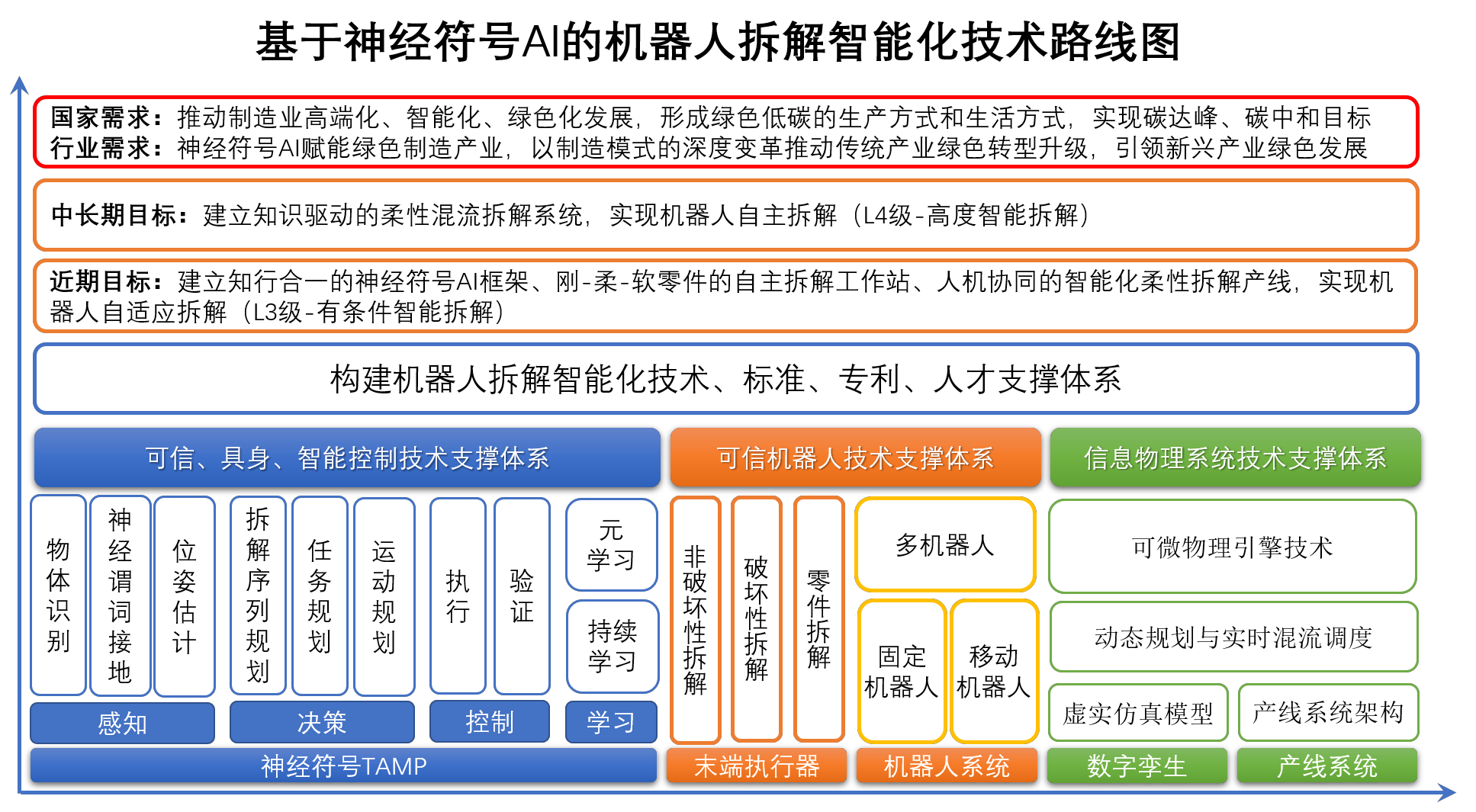
基于神经符号AI的机器人拆解智能化技术路线图
发展目标
以制造业高端化、智能化、绿色化发展为导向,攻克和掌握符合市场需求、实现机器人自主拆解的可信人工智能技术,构建自主可控技术体系和标准、专利、人才支撑体系,探索建立软硬件协同创新生态,推动我国机器人拆解智能化共性基础技术和重大前沿技术的自主发展。
- 基于神经符号AI的机器人拆解智能化技术路线图(2023版)
(PDF下载)
- 基于神经符号AI的机器人拆解智能化技术路线图2.0 (2024版)
(PDF下载)
- 基于神经符号AI的机器人拆解智能化技术路线图3.0 (2025版)
(PDF下载)